Geom#
It is a static object in the environment that cannot change its position by contact and collision. It is used to model static objects that are fixed in reality.
Goal#

Can be constrained |
No collision |
|---|---|
❌ |
✅ |
Used to model the target location in the environment.
In the general setting: Get closer to the location of Goal to get a positive reward, and getting farther will cause a negative reward. Arrive to get the task completion reward, after which the target location will be refreshed.
Constraints#
Nothing.
Buttons#

Can be constrained |
No collision |
|---|---|
✅ |
❌ |
Specifically for the Button task, four solid, fixed-position buttons are modeled, and one button is randomly selected as the target button, which must be approached and pressed.
In the button[012] task: get a positive reward for being close to the target button, get a negative reward for being far away, and get a task completion reward for reaching it, after which the target button will be refreshed. Just after reaching a goal, there will be a period of time when all buttons are unobservable, and no cost will be generated by touching the button.
In button[12]: If the wrong button is pressed, cost will be generated.
Constraints#
press_wrong_button: If agent touches a button other than
goal_buttonwhenself.timer == 0(initial value is 10, minus 1 for each time step), it will generate cost:self.cost.
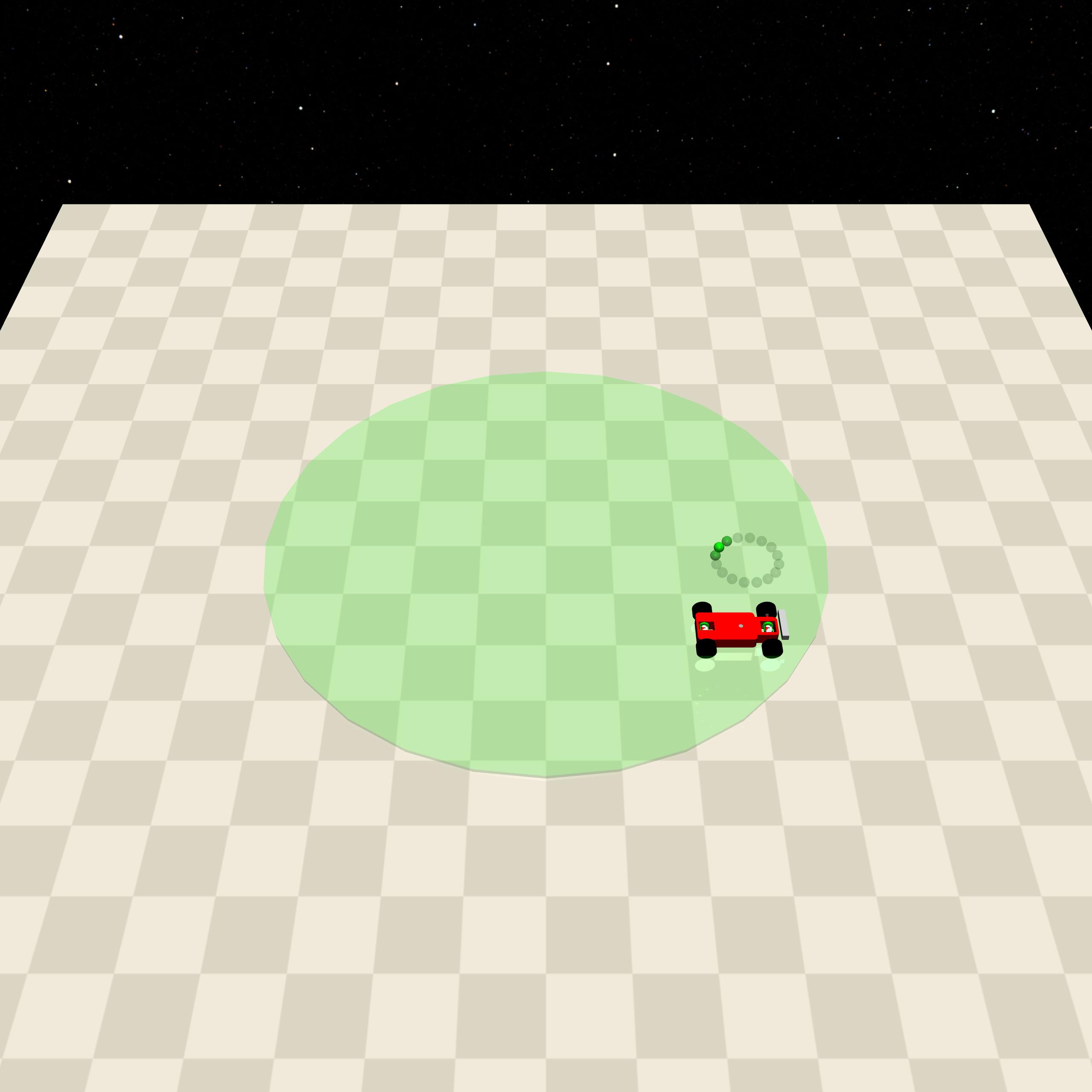
Circle#
Can be constrained |
No collision |
|---|---|
❌ |
✅ |
Specifically used in the Circle task to visualize a size sized circular area.
Constraints#
Nothing.
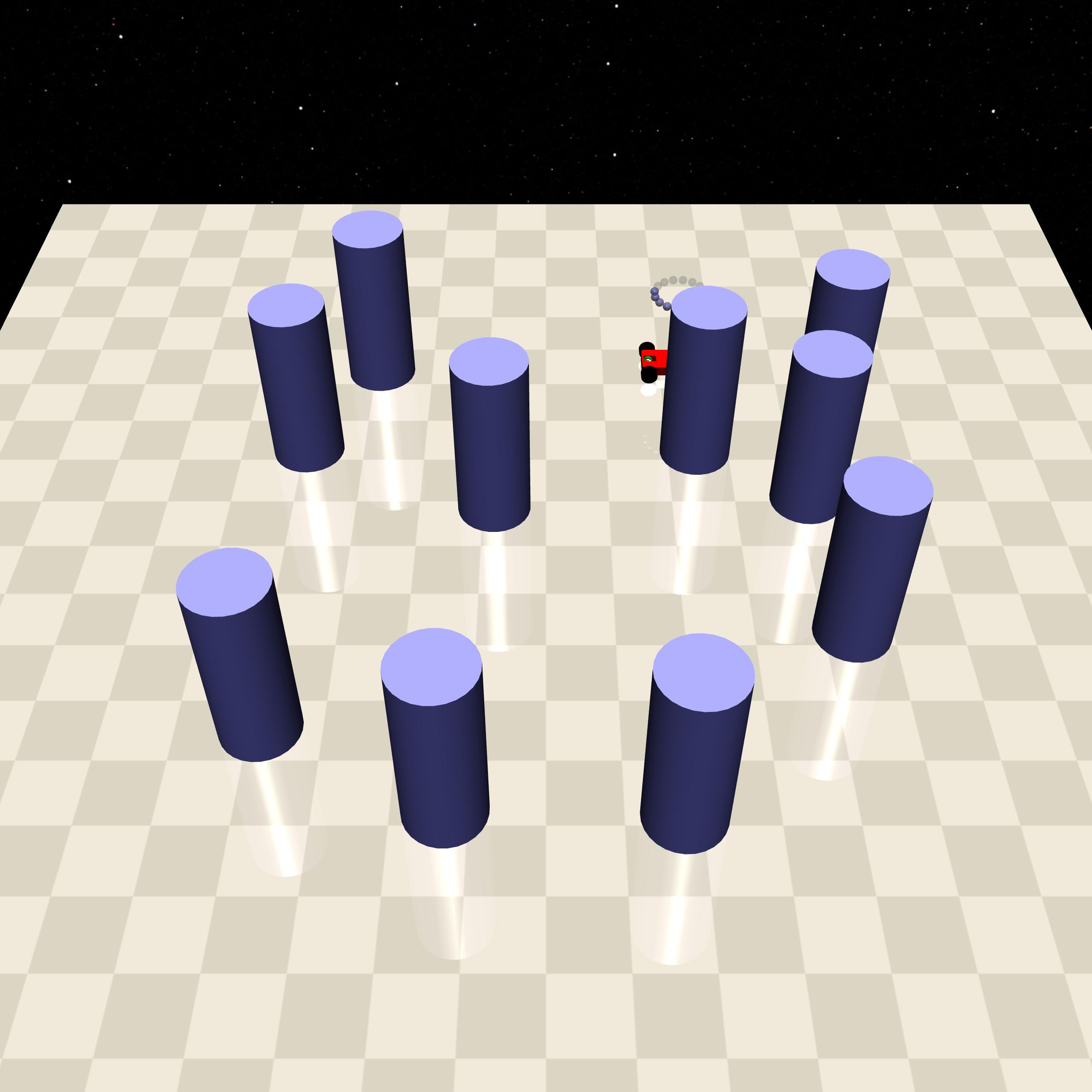
Pillars#
Can be constrained |
No collision |
|---|---|
✅ |
❌ |
Used to model large cylindrical obstacles in the environment.
In the general setting: contact with it will incur cost.
Constraints#
contact_cost: When the agent comes into contact with Pillars, a cost will be generated:
self.cost
Hazards#

Can be constrained |
No collision |
|---|---|
✅ |
✅ |
Used to model hazardous areas in the environment where entering the area generates cost.
Constraints#
cost_hazards: When the distance of the agent from the center of the hazards
h_dist <= self.size, the cost is generated:self.cost * (self.size - h_dist).
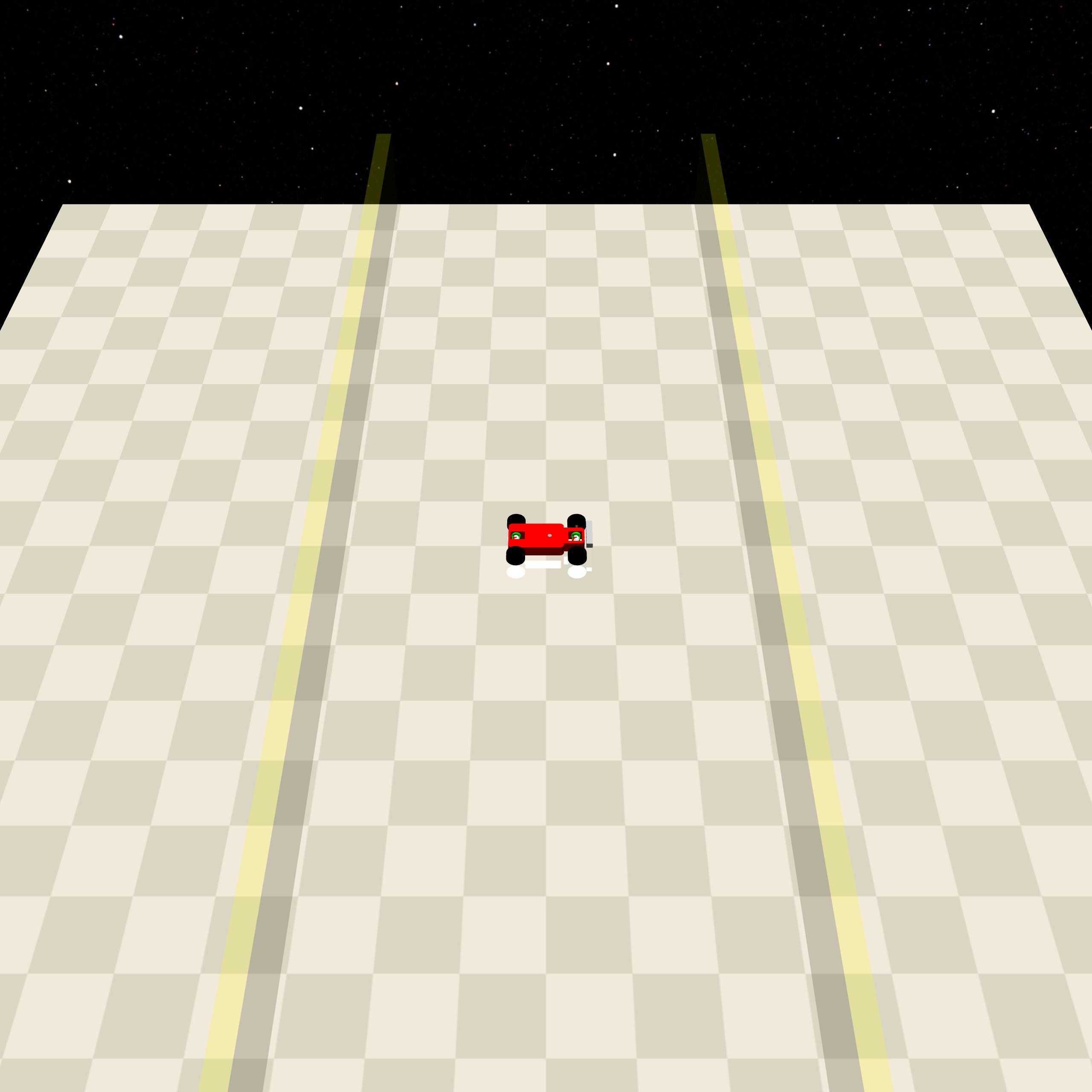
Sigwalls#
Can be constrained |
No collision |
|---|---|
✅ |
✅ |
Specifically for Circle tasks, visualize 2 or 4 solid-free walls to limit the circular area to a smaller area where crossing the wall from inside the safe area to the outside will generate cost.
Circle[1]: Constrain on the x-axis to generate 2 walls.
Circle[2]: Constrain on the x-y axis to generate 4 walls.
Constraints#
out_of_boundary_cost: When the agent crosses the boundary from inside the circular domain outward, it generates cost:
1
Fixedwalls#

Can be constrained |
No collision |
|---|---|
✅ |
❌ |
In certain scenarios, especially when modeling complex visual tasks, irregular fixed walls are utilized. These walls are designed to simulate real-world fixed obstacles as accurately as possible. Both the shape and position of these walls remain constant within a given task.
Constraints#
cost_static_geoms_contact: This parameter incurs a cost of
1when the agent comes into contact withFixedWalls.