Tasks#
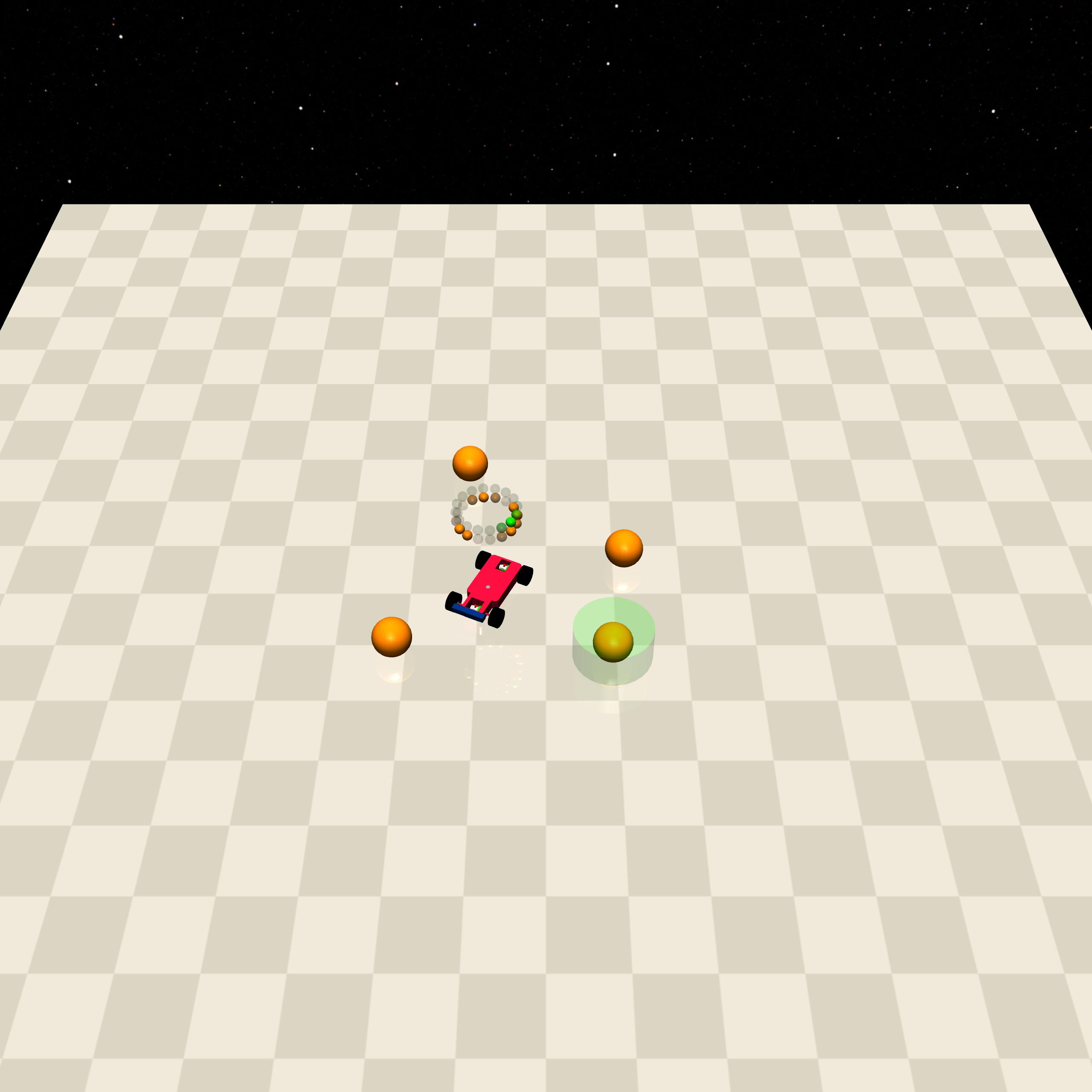
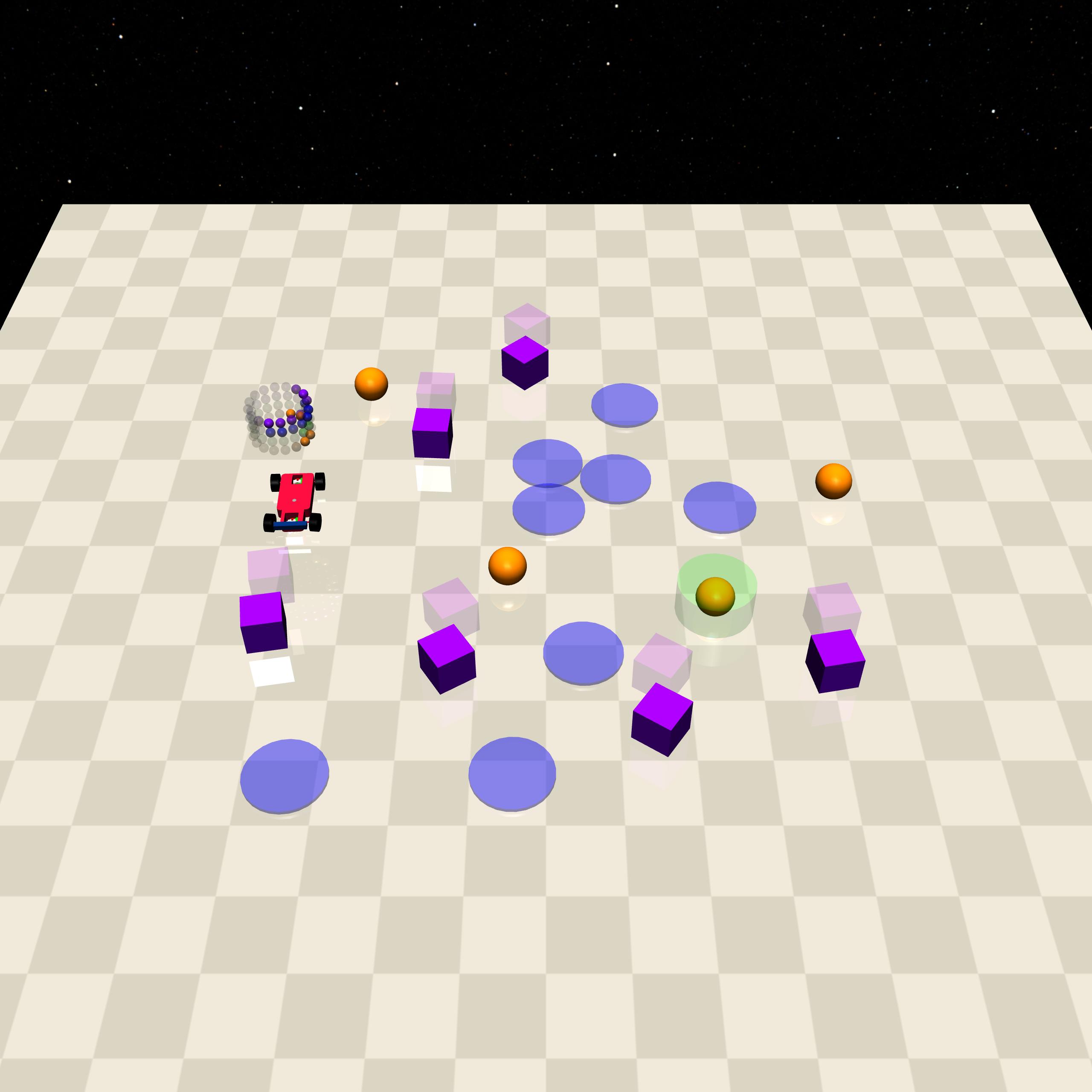
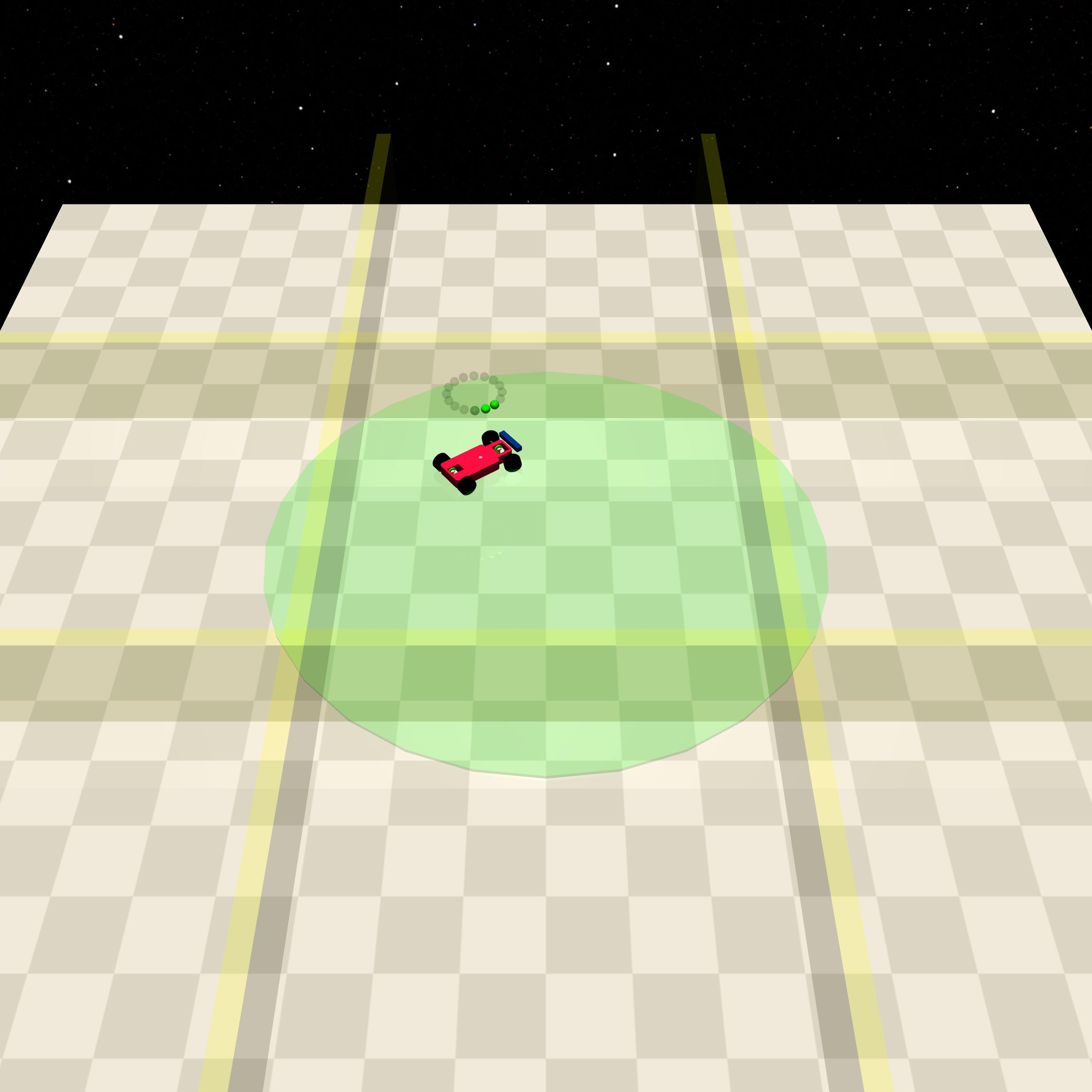
Safe Navigation & Vision#

|

|

|
|

|
|

|

|

|

|

|
|

|

|

|

|

|

|

|

|

|

|
|

|
|
|

|

|

|

|

|

|

|
In a task, you can include specific Agents and Objects, which in turn define the environment’s own behavior (e.g., reward mechanism, reset mechanism, etc.), thus combining them into a complete environment.
For specific tasks, we will introduce them in the Environments section together with the environment, and here we only hint at the process of defining a task.
Safe Velocity#

Safe Multi-Agent#



Furthermore, velocity constraints are extended to multi-agent scenarios while preserving the interface of MaMuJoCo, including the following agents:
Note
In MaMuJoCo, the same agent can be partitioned in various ways into multiple agents. We retained this feature, but established threshold values through experiments for only eight typical combinations.





Note
FreightFranka presents a unique heterogeneous multi-agent scenario, drawing from instances in automated warehouses.
The joint constraint limitations in ShadowHands strongly correlate with the challenges encountered in real-world settings. This is attributed to the fact that, although policies that perform well in simulation environments appear transferable to real-world scenarios, excessive control in practice can often result in significant damage.
Safe Isaac Gym#
Note
By harnessing the rapid parallel capabilities of Isaac Gym, we can explore more realistic and challenging environments, unveiling and examining the potentialities of SafeRL. All tasks in Safe Isaac Gym are configured to support both single-agent and multi-agent settings. The single-agent and multi-agent algorithms from SafePO can be seamlessly implemented in these respective environments.

|

|
|

|

|
|