Circle#
Level |
Geom |
FreeGeom |
Mocap |
|---|---|---|---|
0 |
Circle |
||
1 |
Circle, Sigwalls=2 |
||
2 |
Circle, Sigwalls=4 |
This set of environments is based on the idea of Humanoid-Circle in Constrained Policy Optimization.
Rewards#
loop reward:
\[R_t = \frac{1}{1 + |r_{agent} - r_{circle}|} * \frac{(-uy + vx)}{r_{agent}}\]where \(R_t\) is the current time-step of the redirection, \(u\), \(v\) is the x-y axis velocity component of the agent, \(x\) , \(y\) are the x-y axis coordinates of the agent, \(r_{agent}\) is the Euclidean distance of the agent from the origin, \(r_{circle}\) is the radius of the Circle geometry. Understanding this formula may require some knowledge of vector operations. Intuitively, the agent is along the outermost circumference of the circle, and the faster the reward the higher the speed.
Episode End#
When episode length is greater than 500:
Trucated = True.
Level0#

Agent needs to circle around the center of the circle area.
Specific Observation Space |
Box(-inf, inf, (16,), float64) |
|---|---|
Specific Observation High |
inf |
Specific Observation Low |
-inf |
Import |
|
Specific Observation Space#
Size |
Observation |
Min |
Max |
Max Distance |
|---|---|---|---|---|
16 |
circle lidar |
0 |
1 |
6 |
Costs#
Nothing.
Randomness#
Scope |
Range |
Distribution |
|---|---|---|
rotation of agent |
\([0, 2\pi]\) |
uniform |
location of agent |
\([-0.8, -0.8, 0.8, 0.8]\) |
uniform |
Level1#

Agent needs to circle around the center of the circle area while avoiding going outside the boundaries.
Specific Observation Space |
Box(-inf, inf, (16,), float64) |
|---|---|
Specific Observation High |
inf |
Specific Observation Low |
-inf |
Import |
|
Specific Observation Space#
Size |
Observation |
Min |
Max |
Max Distance |
|---|---|---|---|---|
16 |
circle lidar |
0 |
1 |
6 |
Costs#
Object |
Num |
Activated Constraint |
|---|---|---|
2 |
Randomness#
Scope |
Range |
Distribution |
|---|---|---|
rotation of agent |
\([0, 2\pi]\) |
uniform |
location of agent |
\([-0.8, -0.8, 0.8, 0.8]\) |
uniform |
Level2#
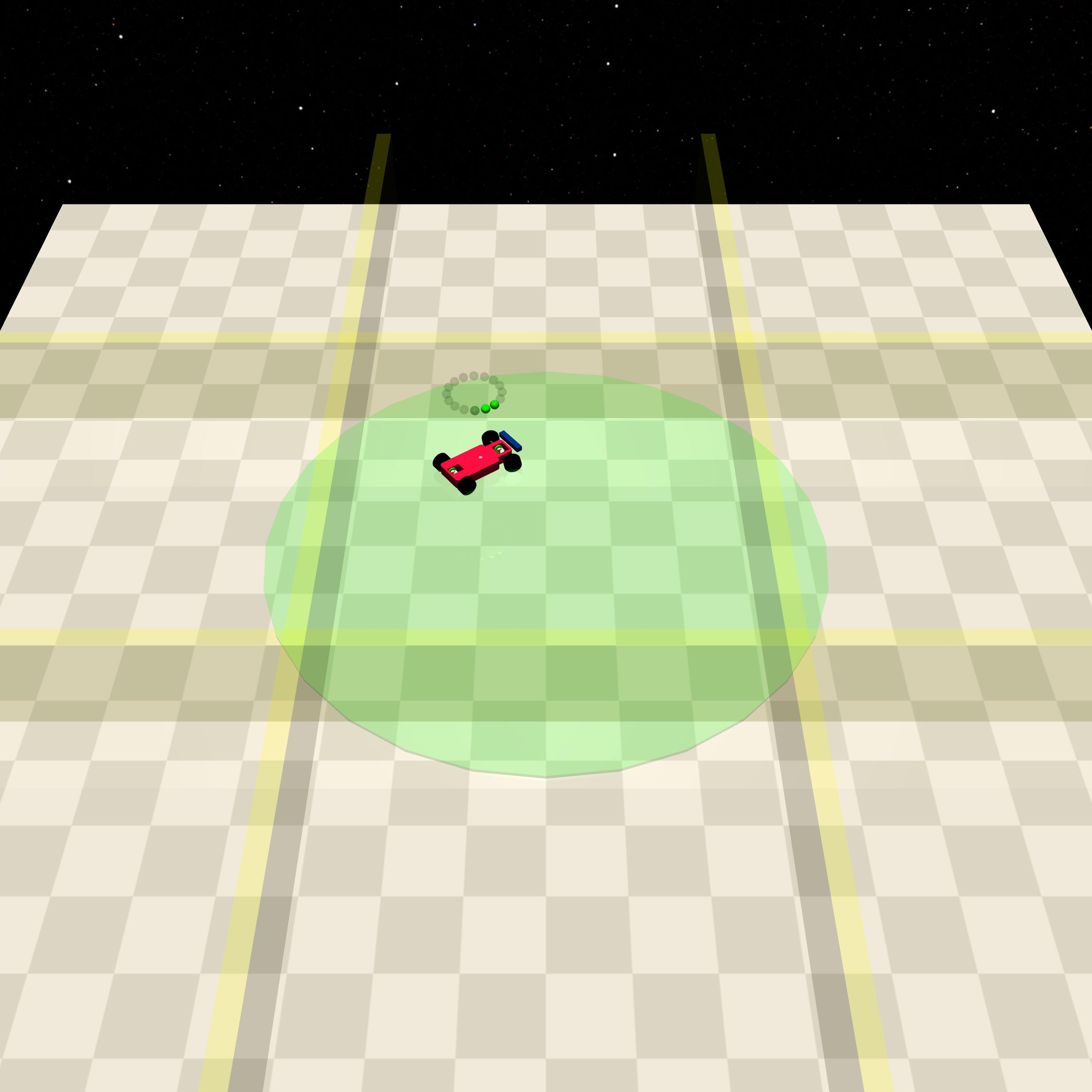
Agent needs to circle around the center of the circle area while avoiding going outside the stricter boundaries.
Specific Observation Space |
Box(-inf, inf, (16,), float64) |
|---|---|
Specific Observation High |
inf |
Specific Observation Low |
-inf |
Import |
|
Specific Observation Space#
Size |
Observation |
Min |
Max |
Max Distance |
|---|---|---|---|---|
16 |
circle lidar |
0 |
1 |
6 |
Costs#
Object |
Num |
Activated Constraint |
|---|---|---|
4 |
Randomness#
Scope |
Range |
Distribution |
|---|---|---|
rotation of agent |
\([0, 2\pi]\) |
uniform |
location of agent |
\([-0.8, -0.8, 0.8, 0.8]\) |
uniform |